系统连接拓扑架构
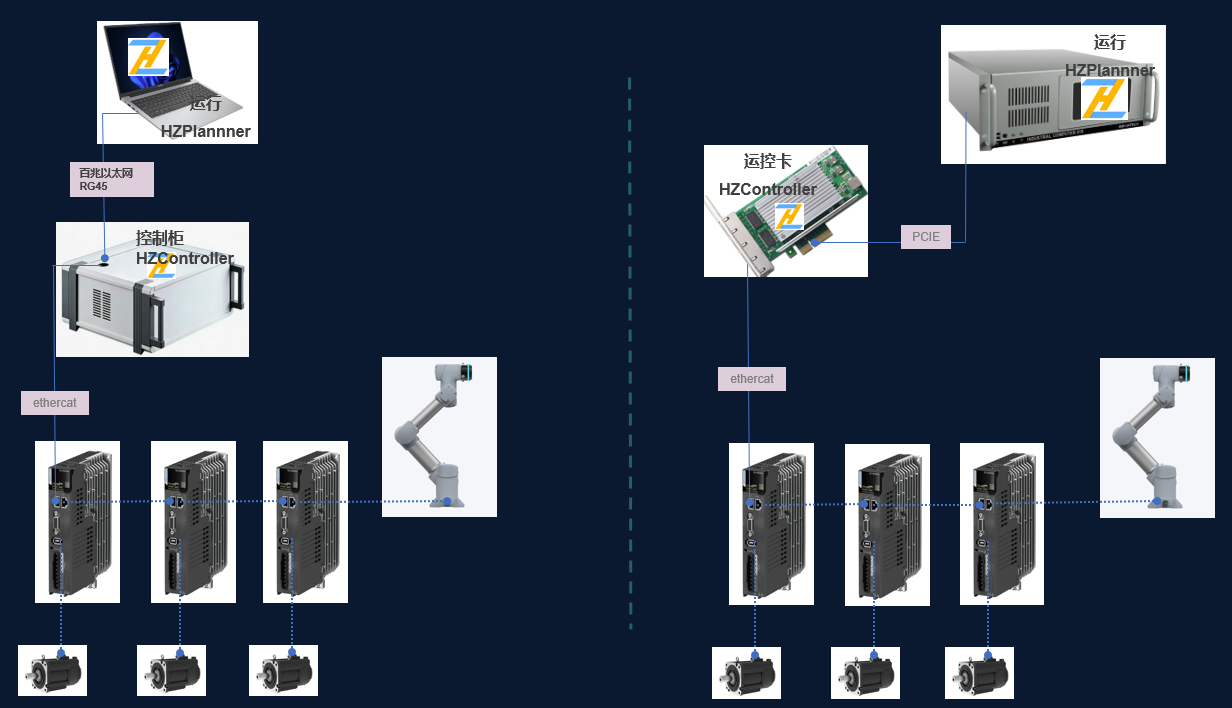
PC (HZPlanner)
PCIe/千兆网口
HZController 运控卡
EtherCAT 总线设备
基于 EtherCAT 总线的实时运动控制核心。打破传统控制器限制,实现机器人与外部轴的毫秒级实时联动,满足复杂工业场景需求。
咨询硬件参数基于 EtherCAT 工业总线通讯,控制周期可达 1ms 甚至 0.5ms,确保高动态响应性能。
支持 6 轴机器人 + 3 个外部扩展轴(如地轨、变位机)的同步插补控制,协同作业无延迟。
兼容主流伺服驱动器(汇川、松下、台达等),适配多种机械结构配置。
| 通讯协议 | EtherCAT CoE (CANopen over EtherCAT) |
|---|---|
| 控制周期 | 1ms (默认) / 0.5ms (高性能模式) |
| 最大轴数 | 支持最大 32 轴同步控制 (推荐配置:6关节+3辅轴) |
| 接口类型 | PCIe x1 插槽 / 标准 RJ45 千兆网口 |
| 支持设备 | 工业机器人、伺服驱动器、IO模块、模拟量模块 |
| 开发环境 | 支持 C++ / C# 二次开发,提供标准 API 接口 |